Cómo funciona:
Los sensores de corriente de lazo abierto usan amperi.Ley (generada alrededor de un cable recto energizado)
El campo magnético es proporcional a la corriente en el cable), utilizando las características del dispositivo hall,
Mediante la detección de la magnitud de la intensidad del campo magnético B generado por la corriente lateral primaria, se puede detectar
La cantidad de corriente en el cable. La relación de B a I en el intervalo lineal de la histéresis
La relación es:
B (IP) = K * IP (K es una constante)
El voltade Hall puede expresarse como:
VH=(RH/d) * I * K * IP
Excepto que IP es una variable, el resto son constantes, así:
VH=K1 * IP (K1 es una constante)
Los chips Hall específicos derivan la corriente primaria amplificando el VH para obtener el volta.
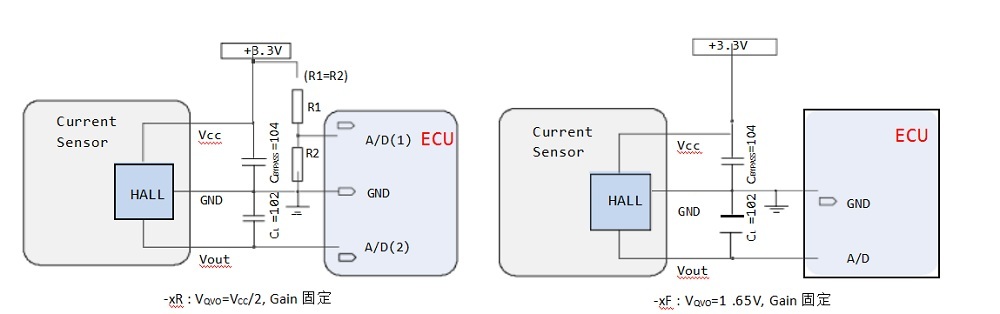
* el condensador de deriven en el extremo VCC debe estar lo más cerca posible al pie Vc del sensor
* el condensde deriven en el extremo Vout debe estar lo más cerca posible al pie Vout del sensor
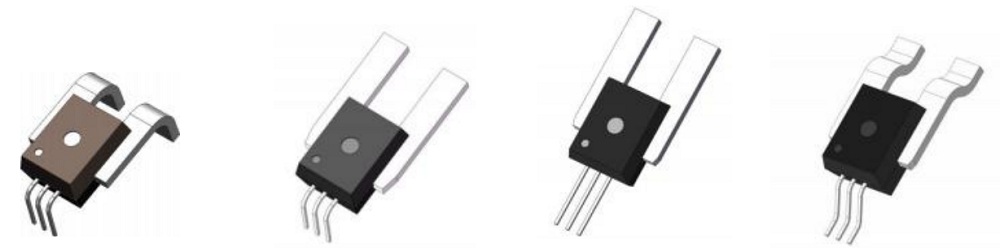
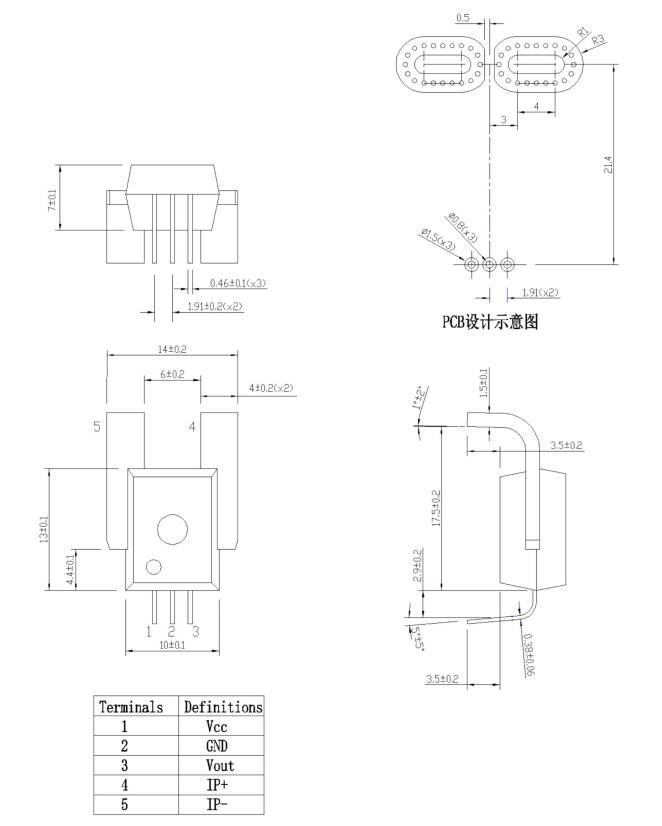
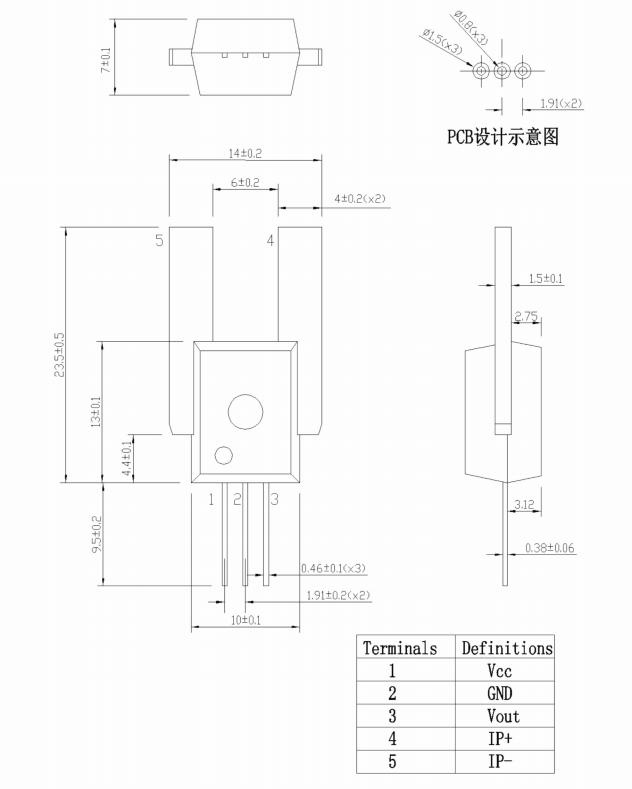
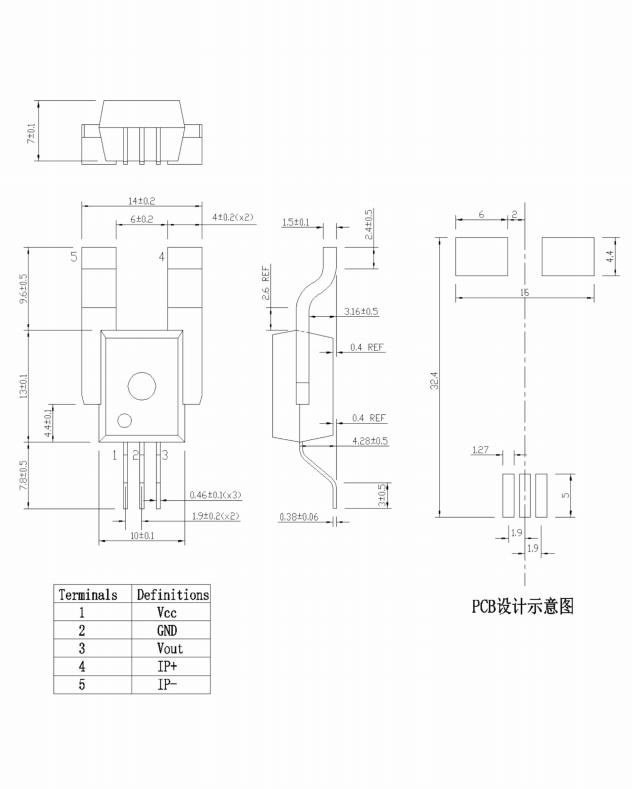
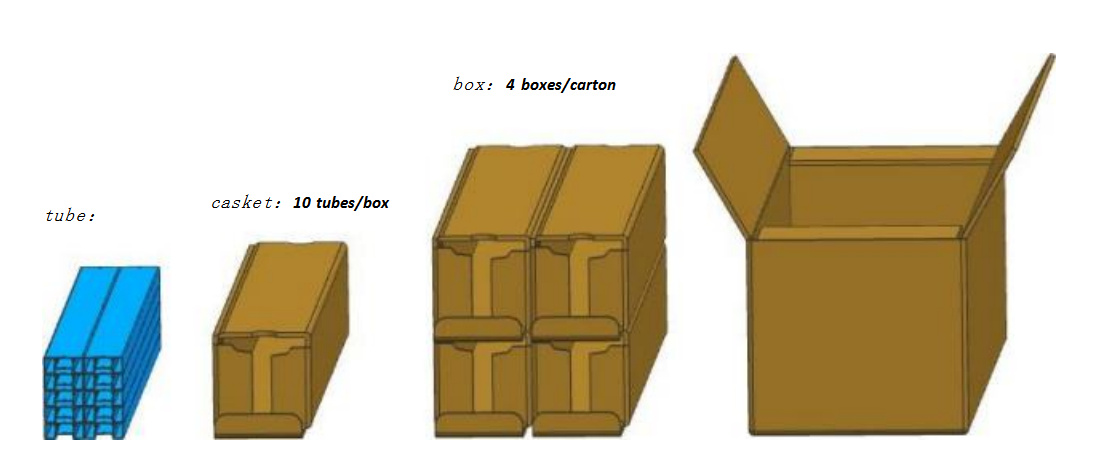
Paquete estándar (PFF) Paquete paquete PSS package Embalaje SMT

Tensión de salida estática (QVO) : la tensión de salida del sensor VQVO en el estado de ningún campo magnético obvio B = 0 G
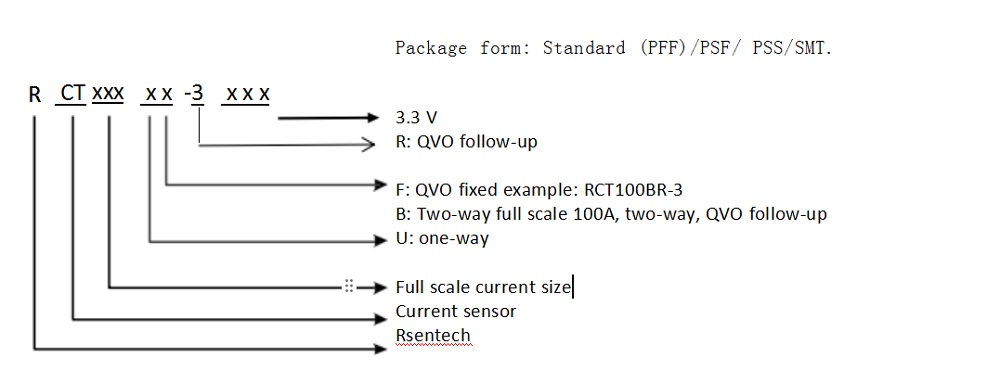
-xR: VQVO y ganancia tienen una relación constante con la tensión de alimentación VCC; VQVO = VCC/2
-xF: VQVO y ganancia no cambian con la tensión de alimentación VCC dentro de un cierto rango; VQVO = 1. 65V o VQVO = 0. 5V
Sens(sensibilidad): Sens es la pendiente de la línea de salida de referencia VOUT = VQVO + 1.32 × IP/IP_MAX, que se refiere al cambio de salida con el cambio de corriente. La relación entre SenS = 1.32 /IP_MAX es la siguiente
Compensación con la temperatura: el punto cero puede compensarse con la temperatura ambiente de funcionamiento debido a tolerancias internas de los componentes, factores de tensión y disipación de calor.
Sensibilidad con la temperatura: debido a la influencia del factor de compensación de temperatura interno, la sensibilidad cambiará a toda la temperatura de funcionamiento en comparación con el valor esperado a temperatura ambiente.
Tensión de desplazamiento eléctrico: el error causado por el ruido causado por la amplificación múltiple del componente HALL y el amplificador operacional se llama tensión de desplazamiento
Tensión de desplazamiento magnético cero: cuando la corriente primaria es causada por el máximo IP - > 0, el error generado en el extremo de salida se llama tensión de desplazamiento magnético cero debido al fenómeno de histéresis del sensorNúcleo magnético
Tensión de desplazamiento: la tensión de desplazamiento es la tensión de salida cuando la corriente primaria es cero, y el valor ideal es
VQVO = VCC/2(o 1,65v). Por lo tanto, la diferencia entre VQVO y el valor ideal se llama el total Zero offset voltage error. Este error de desplazamiento se puede atribuir a la tensión de desplazamiento cero (debido a la resolución del ajuste del QVO dentro del ASIC), desplazamiento magnético, deriva de temperatura e histéresis indupor la temperatura.
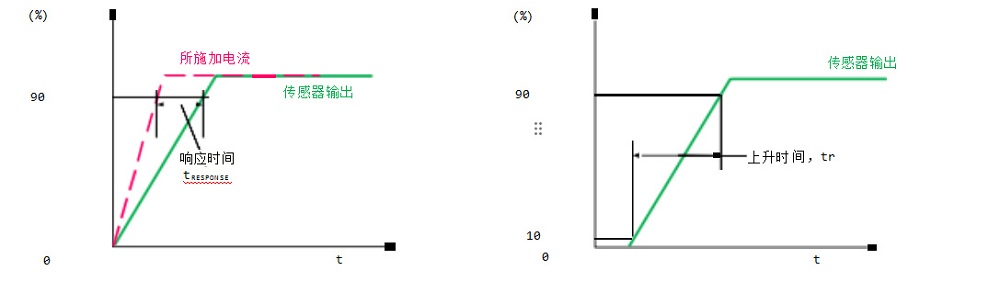
Tiempo de respuesta: el tiempo de respuesta del sensor se refiere al intervalo de tiempo entre cuando la corriente aplicada alcanza el 90% final y la salida del sensor al valor correspondiente de la corriente aplicada
Tiempo de subida: el tiempo de subida del sensor se refiere al intervalo de tiempo entre el 10% de la salida del sensor y llegar al 90% final
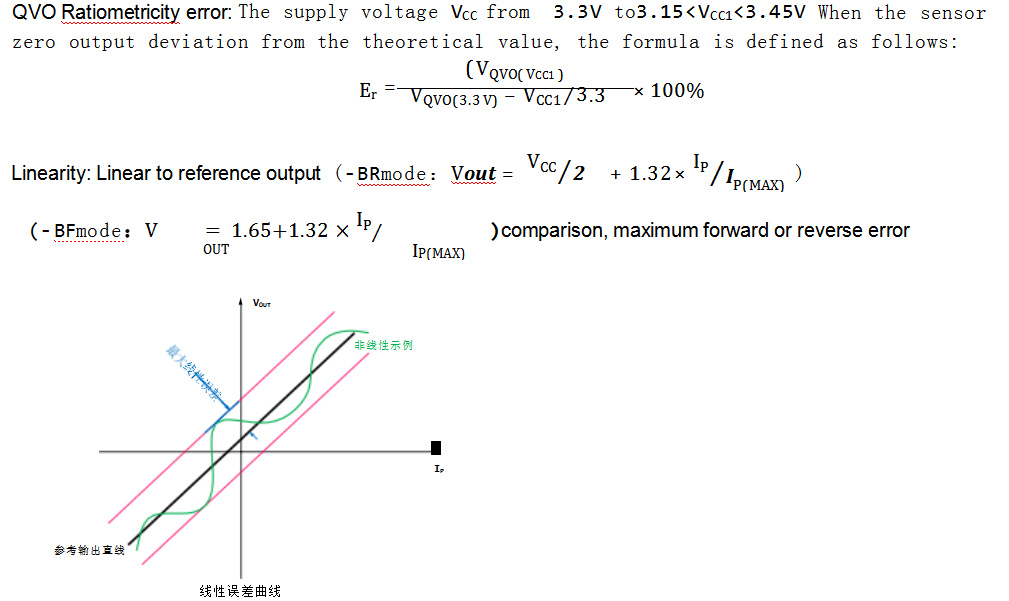
Error de salida Total (ETOT): la diferencia entre el sensorMedición de corriente y corriente actual (IP), definida por la fórmula como la diferencia entre la tensión de salida ideal y la tensión de salida real dividida por la sensibilidad ideal:
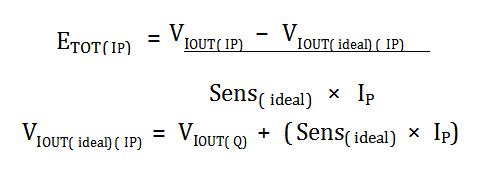
A una corriente relativamente alta, el ETOT es causado principalmente por un error de sensibilidad. A corrientes relativamente bajas, ETOT se debe principalmente al error de voltases(VOE). De hecho, cuando IP se acerca a cero, ETOT se acerca a infinito debido al error de voltade ses.
Nota:
1. Las conexiones de cable incorrectas pueden dañar el sensor. Después de conectar el sensor a la fuente de alimentación de 3,3v, la corriente medida pasa a través de la dirección de flecha del sensor y el valor de tensión correspondiente se puede medir en el extremo de salida.
2. -BR: la tensión de salida VOUT es directamente proporcional a la tensión de alimentación VCC, VOUT = VCC − 2 + 1.32 ⁄ IP − I, y la tensión de alimentación cambia P(MAX).
Cambio, causará cambios en la relación VOUT.
Por ejemplo, el VCC varía de 3.15V a 3.45V. La correspondiente tensión de salida estática VQVO en 0A oscila entre 1,575v a 1,7525v. El rango de salida de VOUT a gran escala (IPMAX) es 2.895V~3.045V.
Modo -BF: tensión de salida nula VQVO= 1,65v, ganancia fijada en 1,32v, curva de salida: VOUT= 1,65 + 1,32 × IP/ IPP (MAX)
Por ejemplo, el VCC varía de 3.15V a 3.45V. La correspondiente tensión de salida estática de salida VQVO a 0A es 1,65v; VOUT a escala real (IPMAX) tiene una salida constante de 2.97V.
• sensor de corriente de lazo abierto basado en el principio de inducción hall
• fuente de alimentación única 3,3v
• soporte de salida unidireccional y bidireccional
• salida analógica
• el rango de corriente de medición en el lado primario puede ser de -50a a -250a
• rango de temperatura de funcionamiento del Sensor: -40 °C a +125°C
(150A es -40 °C a +105°C; 200A es -40 °C a +85°C)
• tensión de salida cero:
-xR: sesde la salida de QVO y VCC en la misma proporción, y la ganancia es fija
VQVO=VCC/2
-xF: el sesqvo y la ganancia son fijos
VQVO= 1,65 o 0,50
• buena precisión, linealidad y deriva de temperatura
• baja resistencia interna, puede controlar eficazmente el consumo de energía de calefacción
• controlador del motor EV/HEV
• cambide frecuencia
• DC/DC
| El pin | nombre | descripción |
| 1 | VCC | Fuente de alimentación del Senso |
| 2 | PNB | a |
| 3 | VOUT | Salida analógica del Sensor |
| 4 | IP+ | Flujo de corriente + |
| 5 | IP- | Corriente de entrada - |
| característico | Símbolo símbolo | clasificación | unidad |
| Tensión de alimentación | VCC | -0,3 a 4.6 | V |
| Corriente de suministro | La CPI | 18 | mun |
| Tensión de salida | VOUT | 0.15 a VCC-0.15 | V |
| Corriente de salida | IOUT | 40 | mun |
| Temperatura de funcionamiena | Tun | 40 a 150 | i |
| Máxima temperatura de Unión | TJ | 165 | i |
| Temperatura de almacenamiento | t | -55 a 165 | i |
Parámetros de funcionamiento Dc a VCC = 3,3v (a menos que se especifique lo contrario), Tun dentro del rango de temperatura especificado.
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max Max | unidad | ||
| Tensión de alimentación | VCC | 3 | 3.3 | 3.6 | V | |||
| Corriente de suministro | La CPI | RL 10K ≥ | 13 | 18 | mun | |||
| Retraso de encendido | TPO | Tun=25°C | 80 | s | ||||
| Error de seguimiento de QVO (-R) | Er | -0,3 | 0.3 | % | ||||
| RCTxxxBR | VCC/2 | |||||||
| Cero salida de corriente | VQVO | RCTxxxBF | Tun = 25°C | 1,65 | ||||
| RCTxxxUF | 0.5 | |||||||
| RCTxxxBR | − 1,32 | V | ||||||
| Rango de tensión de salida @IP | VOUT-VQVO | RCTxxxBF | ||||||
| RCTxxxUF | 2.47 | |||||||
| Resistencia a la carga | RL | VOUT to VCC or PNB | 2 | Ki | ||||
| Capacidad de carga | CL | VOUT a PNB | 6 | 100 | nF | |||
| Tiempo de respuesta | trespuesta | Tun=25°C, CL=1nF, paso IP =50% de IP+, 90% de entrada a 90% de salida | 3 | s | ||||
| unncho de banda | % | Pequeña señal -3dB, CL=1nF, Tun=25°C | 120 | 170 | un KHz | |||
| Impedde salida | La derrota | Tun = 25°C | - | 3 | - | Ω | ||
| característico | Símbolo símbolo | notas | clasificación | unidad |
| *1 tensión de prueba de resistencia dieléctrica | VISO | De acuerdo con la norma UL 60950-1 second Edition, la prueba de tipo de agencia es de 60 segundos | 4800 | VunC |
| Tensión de servicio (aislamiento básico) | VWFSI | unislamiento básico (único) de acuerdo con la norma UL 60950-1, segunda edición | 990 | VDC o Vpk |
| 700 | RMS | |||
| Tensión de servicio (aislamiento reforzado) | VWFRI | unislamiento mejorado (doble) de acuerdo con la norma UL 60950-1, segunda edición | 636 | VDC o Vpk |
| 450 | RMS |
* 1:60 segunda prueba solo para la prueba UL; Probado en producción contra UL60950-1 2nd Edition.
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), Tun=40°C ~125°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 0 | 50 | un | ||
| Sensibilidad del Sensor | SensTun | @VCC=3.3V | 49.4 | MV /un | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @Tun=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | 4 | 3 | 4 | En En En En En En En En En En En En En En En En En En En En mV | |
| VOE | IP=0A,TA=40°C ~125°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 50A | 100 | 200 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0.15 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~125°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= 40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=40°C ~125°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | -100 | 100 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 13.2 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | 4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=40°C ~125°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | Artículo Artículo 100A | 200 | 300 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | - | 0.5 | A | |
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~125°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= 40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=40°C ~125°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 0 | 100 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 24.7 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~125°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 100A | 100 | 150 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | - | 0,25 | A | |
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~125°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~125°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | -50 | 50 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 26.4 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~125°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 50A | 160 | 320 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0.3 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~125°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~105°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | -150 | 150 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 8.8 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~105°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 150A | 300 | 400 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0,75 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | A escala real de IP, TA=25°C~105°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~105°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 0 | 150 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 16.5 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~105°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 150A | 180 | 240 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0.45 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | A escala real de IP, TA=25°C~105°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~85°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 200 | 200 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 6.6 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~85°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 200A | 400 | 500 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 1 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~85°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~85°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 0 | 200 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 12.4 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~85°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | 200A | 200 | 250 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0.5 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~85°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~85°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | -250 | 250 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 5.3 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~85°C | 20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | Sobre las pretensiones de anulación | 500 | 640 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 1.25 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~85°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
Parámetros de operación de cc a VCC = 3.3V (a menos que se especifique lo contrario), TA=-40°C ~85°C
| parámetro | Símbolo símbolo | condición | Min | Typ. | Max | unidad |
| Parámetro Nominal | ||||||
| Rango de medición de corriente primaria | IP | 0 | 250 | A | ||
| Sensibilidad del Sensor | SensTA | @VCC=3.3V | 9.9 | MV /A | ||
| Parámetro de precisión | ||||||
| Error de sensibilidad | ESens | @TA=25°C;VCC=3.3V | -1 | 1 | % | |
| Tensión de desplazamiento cero | IP=0A,TA=25°C | -4 | 3 | 4 | mV | |
| VOE | IP=0A,TA=-40°C ~85°C | -20 | 8 | 20 | mV | |
| Corriente de desplazamiento magnético cero | IP=0A, TA=25°C, después de la excursión de | mA | ||||
| OIM | Sobre las pretensiones de anulación | 250 | 320 | |||
| Corriente de desplazamiento de cero | IOFFSET | TA=25°C | 0,65 | A | ||
| Error de linealidad | LinERR | De pleno derecho | -1 | 0.5 | 1 | % |
| Error Total de salida | (h) | IP, TA=25°C~85°C | -2 | 2 | % | |
| ETOT(LT) | A escala real de IP, TA= -40 °C~25°C | -2 | 2 | % |
| tipo | Tensión de punto cero VOUT(Q) (V) | Rango de corriente primaria (A) | Sensibilidad al sen (tipo)(mV/A) | Forma de encapsul | MPQ(PCS) | MOQ(PC) |
| RCT050BR-3 | VCC/2 | 50 ± | ||||
| RCT050BF-3 | 1,65 | 26.4 | PFF, PSF PSS, SMT | 40 | 400 | |
| RCT050UF-3 | 0.5 | 50 | 49.4 | 40 | 400 | |
| RCT100BR-3 | VCC/2 | |||||
| RCT100BF-3 | 1,65 | 100 ± | 13.2 | PFF, PSF PSS, SMT | 40 | 400 |
| RCT100UF-3 | 0.5 | 100 | 24.7 | 40 | 400 | |
| RCT150BR-3 | VCC/2 | |||||
| RCT150BF-3 | 1,65 | 150 ± | 8.8 | PFF, PSF PSS, SMT | 40 | 400 |
| RCT150UF-3 | 0.5 | 150 | 16.5 | 40 | 400 | |
| RCT200BR-3 | VCC/2 | |||||
| RCT200BF-3 | 1,65 | 200 ±200 | 6.6 | PFF, PSF PSS, SMT | 40 | 400 |
| RCT200UF-3 | 0.5 | 200 | 12.4 | 40 | 400 | |
| RCT250BR-3 | VCC/2 | |||||
| RCT250BF-3 | 1,65 | 250 euros | 5.3 | PFF, PSF PSS, SMT | 40 | 400 |
| RCT250UF-3 | 0.5 | 250 | 9.9 | 40 | 400 |
| clasificación | Título título | descargar |
|---|---|---|
| FCT-CAS |
Deje sus contactos y nuestros ingenieros le ayudarán a encontrar la solución que busca.

¡Hola! Bienvenido de nuevo.
¿Cómo estás?
¡Hablemos! ¡Le proporcionaremos la solución perfecta!
Shanghai Freesor Sensor Technology Co.,Ltd. Fue fundada en 2005 por un número de retornados en el extranjero con una rica experiencia. Es una empresa de alta tecnología que integra diseño, investigación y desarrollo, producción y ventas.
Centro de ventas: Sala 1405-1, edificio B, 333 Haiyang 1st Road, Pudong nueva área, Shanghai
Añadir de fábrica:Edificio 4, Keland Smart Energy Industrial Park, distrito de guang, Shenzhen, provincia de Guangdong, China.